SubT Challenge Qualifier
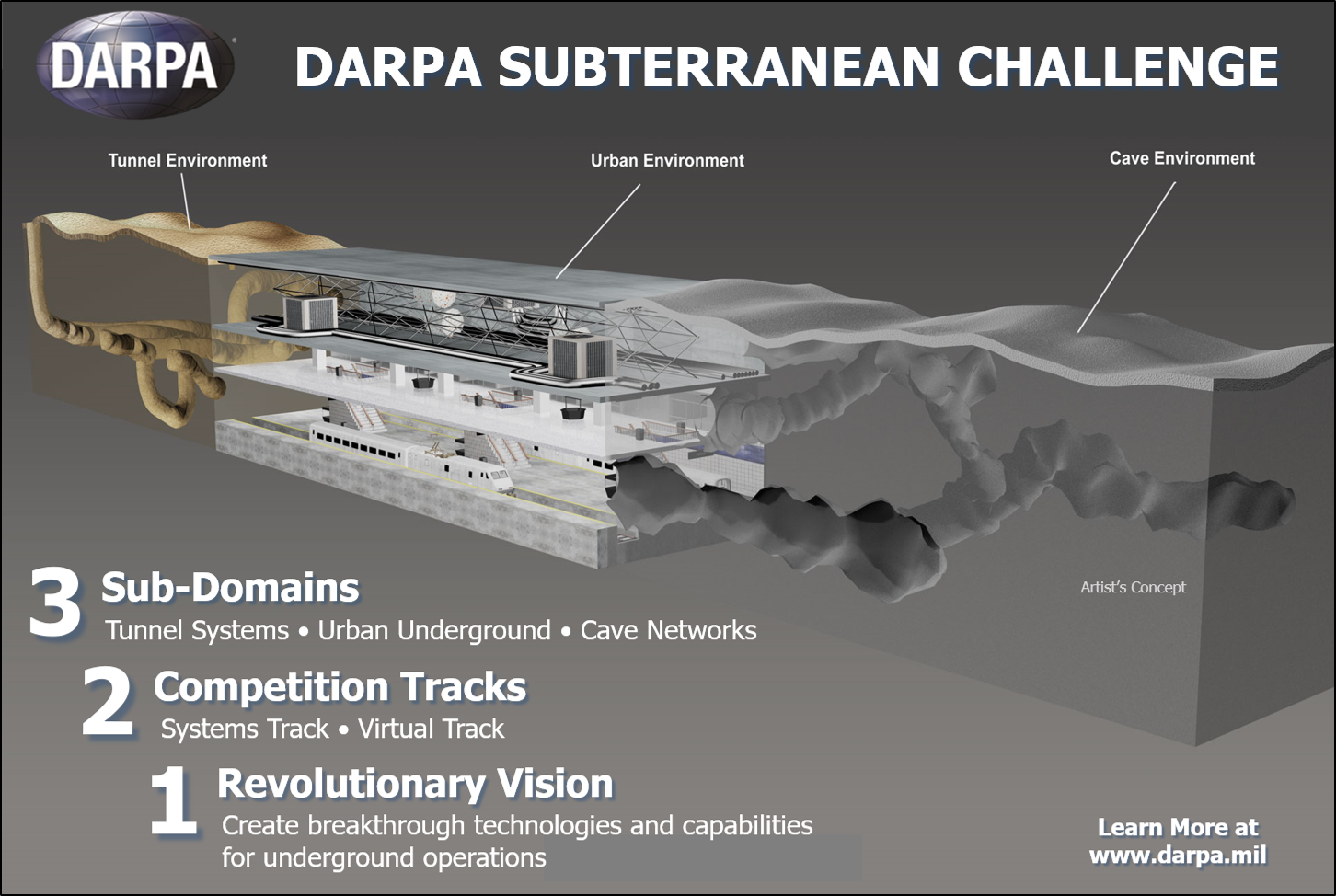
Team CYNET.ai was selected by DARPA (the Defense Advanced Research Projects Agency) as a qualifier in its ground-breaking SubTerranean Challenge (SubT).
SubT is a multi-million dollar competition that will task teams of robots with autonomous exploration deep beneath the surface of the Earth.
After a few months of developing software for the qualification process Team CYNET.ai was one of the only 8 teams across the world that continued through the virtual
track of the competition. Read more details about our participation in SubT.
What We Do

Artificial Intelligence
Using machine learning and especially reinforcement learning to develop agents that get smarter in time

Robotics
& Drones
Researching the autonomous vehicles of the future, from flying robots to self-driving cars

Deep
Learning
Harvesting the power of deep neural networks so the computer can see the world the way we see it

Computer
Vision
Object recognition, 3D scene modeling and everything that helps a robot perceive the environment
Teaching machines to
see the world the way we do
We're not describing each object to the computer. No more detecting lines, circles and textures. We just show our agent lots and lots of pictures and let it learn on its own. We do this using deep learning techniques, building neural networks with multiple convolutional layers, that can then be queried from portable or embedded systems.
Recent Projects



On the quest
for the Artificial
General Intelligence
We want to go big and go bold! Like every AI researcher out there, we're looking for the Holy Grail of technology - the AGI. We believe that with exponentially growing computing power and the endless availability of big data, the path is set and in the coming decades one of us will get there.
Our Favorite Technologies
We're researching many exponential technologies, but here are just a few of the tools we've been using recently and what we're doing with them
-
PyTorch
Our favorite deep learning framework, that we combine it with the power of Nvidia GPU's to train deep neural networks on large sets of images
-
OpenCV
The standard in computer vision, we use it for image pre-processing, visual data augmentation, and basic shape detection tasks
-
Drone hardware
We aim to build fully autonomous drones, with path planning and obstacle detection, by interfacing our computer with a Pixhawk autopilot
-
Microsoft Azure
A lot of our compute hardware resides in the Azure cloud, as embedded IoT devices on drone and robots connect to it to execute more complex operations
-
Mobile apps
As smartphone are ubiquitous now, we provide Android interfaces to most of our application so you get the power of Artificial Intelligence in your pocket
-
Python, C, Java
...and more. We choose the right programming language for each project, from Python from fast development to C, C# or C++ for faster processing
Get updates